I haven't updated this blog in more than a month. I've been pretty busy at work.
The good thing is that I've received all the components I need to start doing more extensive work. I'll try to get things going again soon :-)
Monday, 19 October 2015
Friday, 11 September 2015
IP socket communications
I'm putting together this simple C#-based Windows Forms control app to interact with the quadcopter (written in C++, compiled for ARM). The app will send the flight control commands (e.g. manual input from the Xbox One controller, or waypoints once I have GPS integrated), and receive telemetry data from the quadcopter (e.g. inertial measurements).
At this point I've opted for socket-based IP communications (I'll decide if it's worth it to migrate to long range RC based protocols later) as it's easy and straightforward. There are 3 sockets, each used on its own thread to take advantage of the 4 cores on the Pi
So far everything works fine :-)
As usual the code is on bitbucket. I'll make the control app source public as well soon.
The control app UI is now used to plot the Xbox controller input and send it to the Raspberry Pi. The Pi then only takes the throttle value and changes the PWM signal on channel 0 of the PCA9685.
The charting section of the UI will also be used to plot incoming telemetry. It's going to be useful to calibrate and implement the right low-pass filter on the inertial unit.

At this point I've opted for socket-based IP communications (I'll decide if it's worth it to migrate to long range RC based protocols later) as it's easy and straightforward. There are 3 sockets, each used on its own thread to take advantage of the 4 cores on the Pi
- Beacon socket thread: broadcasts a UDP message, every 1 second, advertising the IP of the quadcopter on the network. Used by the control app to detect and connect to the quadcopter.
- Incoming command socket thread: TCP socket - in order to insure reliability of connection - used to receive commands from the Xbox controller and the control app. This thread will update a singleton class that contains the flight state and current controller input, accessible by other threads.
- Outgoing telemetry socket thread: UDP socket - don't care if packets get lost, just need to minimize overhead. This socket will be used by the control thread, the same that samples the sensors and adjusts the motor speed. I might also run it on a separate thread and queue the telemetry data points to send in a FIFO - whichever has the least overhead on the control loop.
So far everything works fine :-)
As usual the code is on bitbucket. I'll make the control app source public as well soon.
The control app UI is now used to plot the Xbox controller input and send it to the Raspberry Pi. The Pi then only takes the throttle value and changes the PWM signal on channel 0 of the PCA9685.
The charting section of the UI will also be used to plot incoming telemetry. It's going to be useful to calibrate and implement the right low-pass filter on the inertial unit.

The next step will be to interface with real motors once I receive them and the ESC/battery.
Thursday, 3 September 2015
BOM Update
I've updated my bill of manufacturing as I locked it and ordered the parts.
| Description | Size | Units | Weight (g) | Wratio | Price (CAD) | Pratio | Req. | TWeight | Tprice |
| Structure | |||||||||
| Polycarbonate Sheet | 432 | sq-inch | 1000 | 2.3 | $ 23.90 | 0.06 | 128 | 296 | 7.1 |
| Goujon SQ 1/2 | 48 | lin-inch | 99 | 2.1 | $ 1.78 | 0.04 | 48 | 99 | 1.8 |
| Goujon RD 1/2 | 48 | lin-inch | 44 | 0.9 | $ 0.98 | 0.02 | 32 | 29 | 0.7 |
| Insulation tube | 36 | lin-inch | 17 | 0.5 | $ 1.29 | 0.04 | 6 | 3 | 0.2 |
| Sorbothane 1/4" 30 DURO | 50 | sq-inch | 50 | 1.0 | $ 26.95 | 0.54 | 8 | 8 | 4.3 |
| Hardware (screws, nuts, etc.) | 1 | bulk | 100 | 100.0 | $ 50.00 | 50.00 | 1 | 100 | 50.0 |
| Propulsion/Energy | |||||||||
| 750-90008 KA 1050Kv Brushless Motor | 1 | motor | 57 | 57.0 | $ 35.09 | 35.09 | 4 | 228 | 140.4 |
| APC Propellers 10x4.5MR/MRP (ST) | 4 | unit | 65 | 16.3 | $ 17.00 | 4.25 | 4 | 65 | 17.0 |
| 30A SimonK ESC | 4 | unit | 91 | 22.8 | $ 45.80 | 11.45 | 4 | 91 | 45.8 |
| Bias 40C 3S 5000mAh 11.1-volt Lipo | 1 | unit | 415 | 415.0 | $ 67.00 | 67.00 | 1 | 415 | 67.0 |
| Control | |||||||||
| PCA9685 (PWM) | 1 | unit | 7 | 7.0 | $ 15.85 | 15.85 | 1 | 7 | 15.9 |
| Raspberry Pi | 1 | unit | 45 | 45.0 | $ 46.11 | 46.11 | 1 | 45 | 46.1 |
| MPU9250 (accel/gyro/compass) | 1 | unit | 5 | 5.0 | $ 15.61 | 15.61 | 1 | 5 | 15.6 |
| BMP280 (baro/altitude) | 1 | unit | 2 | 2.0 | $ 9.95 | 9.95 | 1 | 2 | 10.0 |
| Rangefinder LV-EZ4 Maxbotix | 1 | unit | 4.23 | 4.2 | $ 24.95 | 24.95 | 1 | 4.23 | 25.0 |
| MCP3008 (ADC) | 1 | unit | 1 | 1.0 | $ 3.75 | 3.75 | 1 | 1 | 3.8 |
| (optional) GPS | |||||||||
| (optional) Xbee radio |
I've updated the target cost as I found the quadcopter reference price in CAD.
| Metric | Total | Target | Delta | % |
| Weight (g) | 1399 | 1500 | -101 | -7% |
| Price (CAD) | 450 | 742 | -292 | -39% |
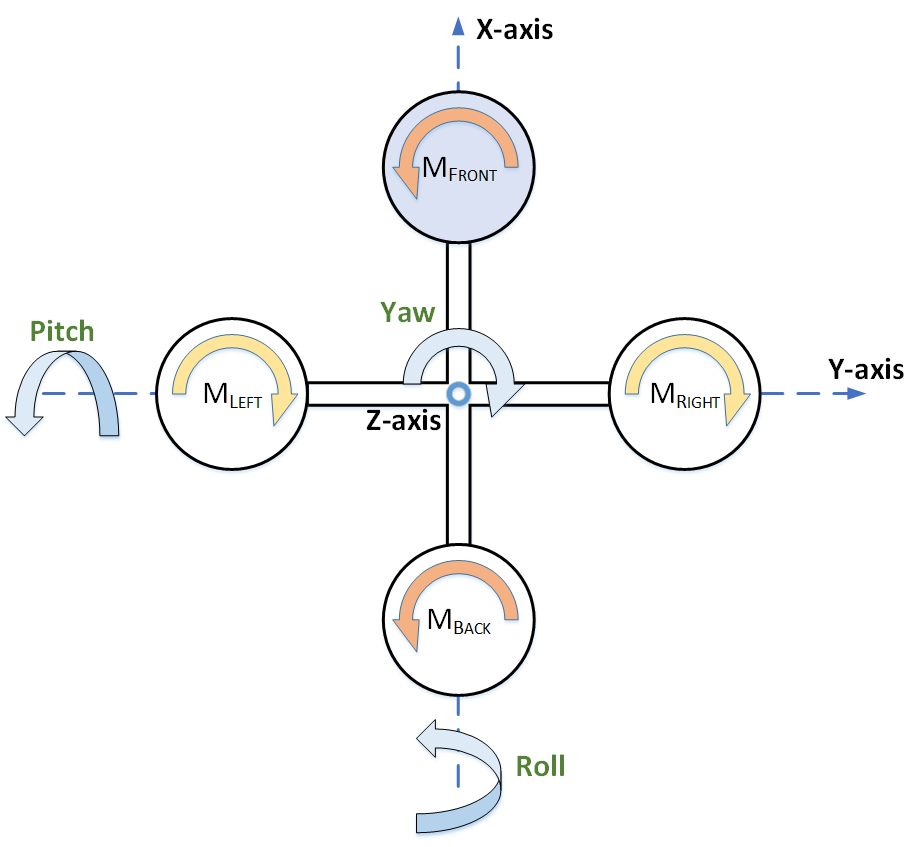
Flight dynamics basics - yaw, roll and pitch
Basic quadcopter flight dynamics were not complex to understand.
You need four propellers, two of them spinning clockwise, and the other two spinning counter-clockwise - in order to have a net angular momentum of 0.
Specific terms are used when the quadcopter rotates around the 3 possible axes.
Roll and Pitch
If you want to tilt the quadrotor left/right (roll) or forward/backward (pitch), then you need to have motors on one side spin faster than motors on the other side.
Yaw
If you want to rotate the quadrotor around the z-axis, then you need to change the net angular momentum to be positive or negative, by increasing the throttle of both motors rotating in the same direction (CW or CCW).
Equations
To make sure that the net thrust of the quad remains stable when rotation/tilt is applied, the desired rotation speed increase is divide by two. That offset is then added to one motor and subtracted from the motor on the other side.
Using XBox One Controller for command input
One of my requirements was to achieve fully autonomous flight. It dawned to me that before I get there, I'll probably need to manually control the quad to perform flight tests and improve the control subsystems. Hence I need a controller, but I don't want to invest in a costly radio-controlled solution.
I already have WiFi onboard the Pi. I have an Xbox One Controller. And I already need to develop a control app to run on my computer. I'll simply interface with the Xbox One controller, which is extremely versatile.

The control mapping will surely change, but it could look like the above.
I'm using Visual Studio Community 2015. In the package manager consoler, install the latest beta version of SharpDX.XInput
Once you have that imported, getting a Controller object is quite simple.. In the example below, in a simple Form app, when I update the text field with the X/Y coordinates of the left joystick anytime the form button is pressed.
I already have WiFi onboard the Pi. I have an Xbox One Controller. And I already need to develop a control app to run on my computer. I'll simply interface with the Xbox One controller, which is extremely versatile.

The control mapping will surely change, but it could look like the above.
- Throttles: control motor throttle in manual mode, control altitude in altitude stabilization mode
- Select: switch between manual, altitude stabilized, position hold and fully automated
- Start: start/stop onboard control
- Right joystick: adjust yaw
- Left joystick: adjust pitch (up / down) and roll (left / right)
- A-button: automated lift-off and landing activation
I'm using Visual Studio Community 2015. In the package manager consoler, install the latest beta version of SharpDX.XInput
Install-Package SharpDX.XInput -PreI'm using the beta version as the latest stable release is based on DX11 and I ended up with missing DX DLLs (Windows 10 comes with DX12).
Once you have that imported, getting a Controller object is quite simple.. In the example below, in a simple Form app, when I update the text field with the X/Y coordinates of the left joystick anytime the form button is pressed.
using SharpDX.XInput;
namespace QuadRemote
{
public partial class Form1 : Form
{
public Controller _controller;
public Form1()
{
InitializeComponent();
_controller = new Controller(SharpDX.XInput.UserIndex.One);
}
private void button1_Click(object sender, EventArgs e)
{
if (_controller.IsConnected)
{
var state = _controller.GetState();
var x = state.Gamepad.LeftThumbX;
var y = state.Gamepad.LeftThumbY;
richTextBox1.Text = x.ToString() + " " + y.ToString();
}
}
}
}
Subscribe to:
Comments (Atom)