Basic quadcopter flight dynamics were not complex to understand.
You need four propellers, two of them spinning clockwise, and the other two spinning counter-clockwise - in order to have a net angular momentum of 0.
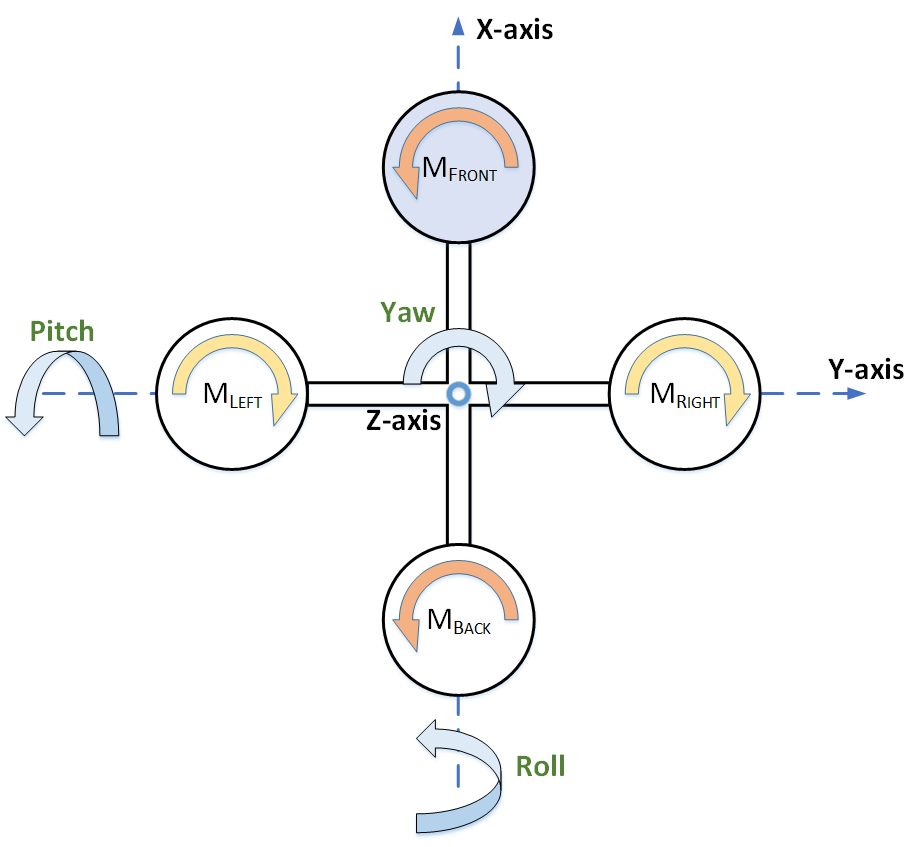
Specific terms are used when the quadcopter rotates around the 3 possible axes.
Roll and Pitch
If you want to tilt the quadrotor left/right (roll) or forward/backward (pitch), then you need to have motors on one side spin faster than motors on the other side.
Yaw
If you want to rotate the quadrotor around the z-axis, then you need to change the net angular momentum to be positive or negative, by increasing the throttle of both motors rotating in the same direction (CW or CCW).
Equations
To make sure that the net thrust of the quad remains stable when rotation/tilt is applied, the desired rotation speed increase is divide by two. That offset is then added to one motor and subtracted from the motor on the other side.
No comments:
Post a Comment